Resistorius
2 ранг
- Регистрация
- 12 Апр 2023
- Сообщения
- 752
- Реакции
- 422
- Баллы
- 32
- Страна
- Lietuva
- Город
- Klaipeda
- Имя
- Resistorius
Некоторые время назад было несколько довольно интересных дискусий на ету тему .
В основном мнения разделились на 2 лагеря :
Одни утверждают что классические способы изьмерения ГД неспособны достоверно отобразить все нюансы работы ГД.
Другие же утверждают что все уже давно известно и заново изобретать велосипеда неимеет особого смысла .
По моему мнению правда как всегда где то по середине .
В чем же заключается ета середина ?
И каким же способом низкодобротник может басить лутче чем высокодобротник ? И может ли вообще ?
Конечно же большинство скажет что не может, и начнут показывать графики одной известной в узких кругах фирмы, указывая на спад ачх слева.
Попробуем разобраться .
В етом нам поможет методика представленная пользователем On1y.
Чем же так не угодил синус ?
Неугодил он тем ,- что низкодобротник с мощным мотором имеет :
с одной стороны большую начальную скорость и большую начальную амплитуду чем высокодобротник.
С другой противо едс значительно больше и нету дополнительной енергий для раскачки ввиде добротности..
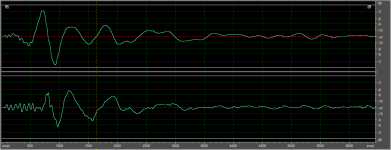
On1y предложил записать тестовы сигнал удара барабана на редакторе для оценки результатирущюего давления .

Для тех кто хоть раз пользовался весами и линейкой, небыло удивлением тот факт ,что давление на первой полуволне у низкодобротника с мощным мотором было выше .
Дальше произошло то ,что и должно было произойти .
Мощны мотор ,низкая добротность и противо едс дали о себе знать .
Выразилось ето тем что конец тестового сигнала в отличие от оригинала имел более быстрое затухание .
Теперь вернёмся к нашему синусу .
Если на секунду забыть об мс ,-то величина противо едс будет зависить от скорости,смешения и частоты .
Ето важно ,так как низкодобротник управляеться в основном електрически.
Далее нужно понимать , то что параметры TS ето усреднёные параметры и при изьмерений на стандартных сигналах ( синусе например ) добротность играет огромную роль в формирований кривой SPL.
Как же ето теперь все связать в кучю и что нам делать с замерами первой полуволны . О чем она нам может расказать ?
1. Вывод довольно очевиден.
Низкодобротник с мощным мотором,- будет отрабатывать одиночные удары ( барабан например ) с большим давлением чем высокодобротник.
Будет лутче отрабатывать резкие изьменения в сигнале.
Чем короче сигнал тем лутче .
2. Вывод ето то что низкодобротник не будет хорошо работать с сигналами типо прописанны синус .
Будет затухать слишком рано и будет себя показывать так как замеренно на синусе .
Интересно послушать мысли и фантазий других пользователей на ету тему .
Тема находиться в беседке. Так что wellcome 😁
@ On1y
Если есть еще графики или интересная инфа можеш закинуть .
В основном мнения разделились на 2 лагеря :
Одни утверждают что классические способы изьмерения ГД неспособны достоверно отобразить все нюансы работы ГД.
Другие же утверждают что все уже давно известно и заново изобретать велосипеда неимеет особого смысла .
По моему мнению правда как всегда где то по середине .
В чем же заключается ета середина ?
И каким же способом низкодобротник может басить лутче чем высокодобротник ? И может ли вообще ?
Конечно же большинство скажет что не может, и начнут показывать графики одной известной в узких кругах фирмы, указывая на спад ачх слева.
Попробуем разобраться .
В етом нам поможет методика представленная пользователем On1y.
Чем же так не угодил синус ?
Неугодил он тем ,- что низкодобротник с мощным мотором имеет :
с одной стороны большую начальную скорость и большую начальную амплитуду чем высокодобротник.
С другой противо едс значительно больше и нету дополнительной енергий для раскачки ввиде добротности..
On1y предложил записать тестовы сигнал удара барабана на редакторе для оценки результатирущюего давления .
Для тех кто хоть раз пользовался весами и линейкой, небыло удивлением тот факт ,что давление на первой полуволне у низкодобротника с мощным мотором было выше .
Дальше произошло то ,что и должно было произойти .
Мощны мотор ,низкая добротность и противо едс дали о себе знать .
Выразилось ето тем что конец тестового сигнала в отличие от оригинала имел более быстрое затухание .
Теперь вернёмся к нашему синусу .
Если на секунду забыть об мс ,-то величина противо едс будет зависить от скорости,смешения и частоты .
Ето важно ,так как низкодобротник управляеться в основном електрически.
Далее нужно понимать , то что параметры TS ето усреднёные параметры и при изьмерений на стандартных сигналах ( синусе например ) добротность играет огромную роль в формирований кривой SPL.
Как же ето теперь все связать в кучю и что нам делать с замерами первой полуволны . О чем она нам может расказать ?
1. Вывод довольно очевиден.
Низкодобротник с мощным мотором,- будет отрабатывать одиночные удары ( барабан например ) с большим давлением чем высокодобротник.
Будет лутче отрабатывать резкие изьменения в сигнале.
Чем короче сигнал тем лутче .
2. Вывод ето то что низкодобротник не будет хорошо работать с сигналами типо прописанны синус .
Будет затухать слишком рано и будет себя показывать так как замеренно на синусе .
Интересно послушать мысли и фантазий других пользователей на ету тему .
Тема находиться в беседке. Так что wellcome 😁
@ On1y
Если есть еще графики или интересная инфа можеш закинуть .
Вложения
Последнее редактирование:
")


